Alt-Link
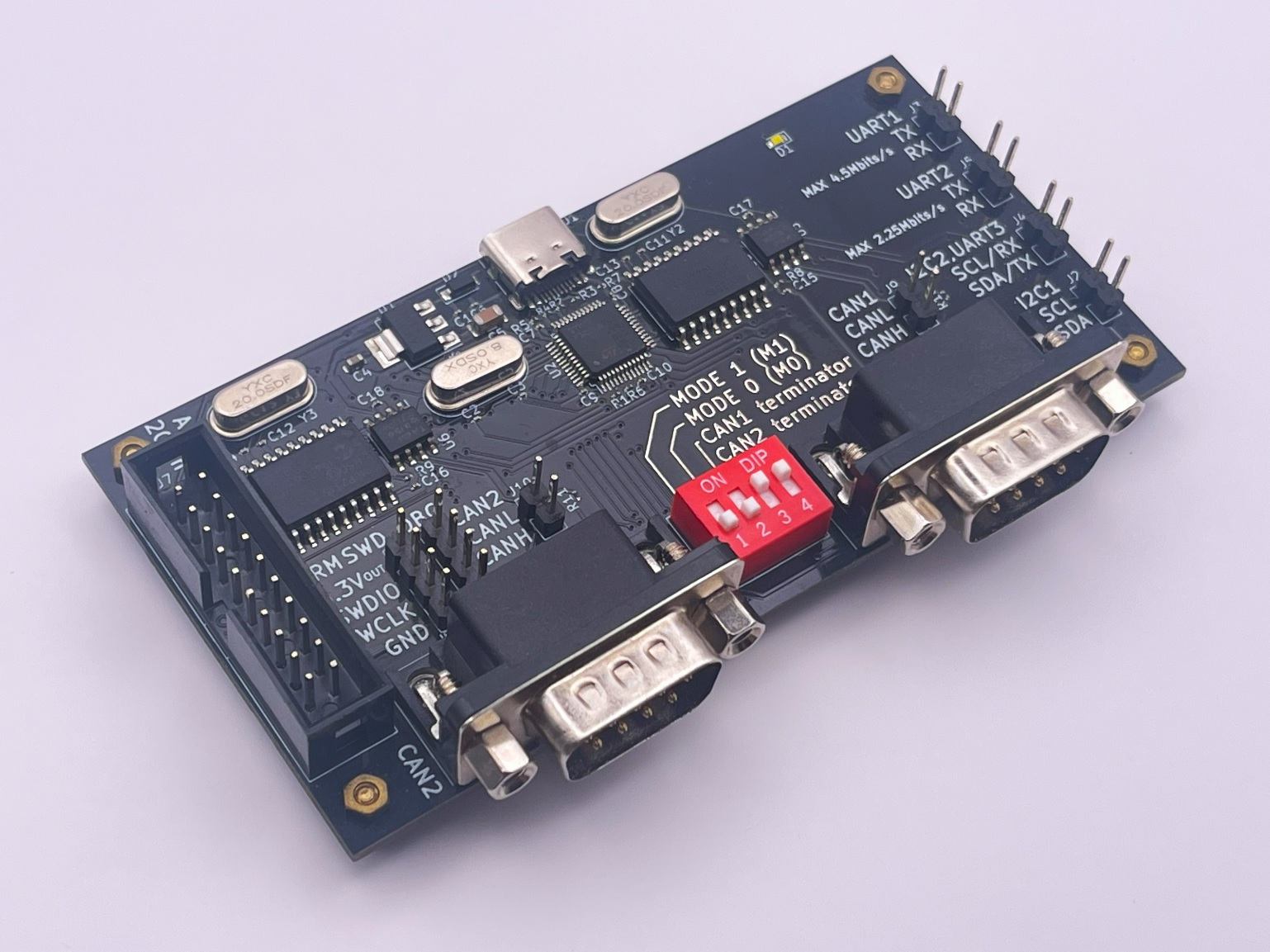
USB-CAN, USB-UART, USB-I2C, SWD/JTAG デバッガを同時に使用できる複合USBデバイス
特徴
- CAN 2.0B: 最大2ch同時利用
- 99.9% 以上のバス使用率(> 10,000 frames/sec)で安定動作
- UART: 最大3ch同時利用
- 最大速度 4.5Mbps 実効速度 4.4Mbps 以上
- OS標準のドライバで動作 ※
※: Windows では USB-I2C のみドライバが必要
購入
準備中です。少数試作段階のため最初は原価に近い形となる予定です。
ファームウェアアップデート
マニュアル
仕様
| USB | |
|---|---|
| 対応規格 | USB 2.0 Full Speed (12Mbps) |
| コネクタ | USB Type-C |
| CAN | |
| 対応規格 | CAN 2.0B アクティブ |
| チャンネル数 | 2 (Mode 00) 1 (Mode 01) 0 (Mode 00) |
| コネクタ | 2pin ピンヘッダ DB9(D-sub 9 ピン) オスコネクタ Pin 2: CAN_L Pin 7: CAN_H |
| 120Ω 終端抵抗 | DIPスイッチで切り替え可能 |
| 通信速度 | 最大1Mbps |
| 実効速度 | 99.9% (500Kbps時) |
| トランシーバー | TJA1051T |
| コントローラー | MCP2515 |
| 通信プロトコル | CAN over Serial / SLCAN (USB CDC-ACM) |
| 対応ソフトウェア | SocketCAN SLCAN (can-utils) on Linux python-can など |
| UART | |
| チャンネル数 | 1 (Mode 00) 2 (Mode 01) 3 (Mode 00) |
| コネクタ | 2pin ピンヘッダ |
| 通信速度 | UART1: 最大4.5Mbps UART2/3: 最大2.25Mbps |
| 通信プロトコル | USB CDC-ACM |
| 対応ソフトウェア | minicom, Tera Term, PuTTY, pySerial など (シリアルポートをサポートする任意のプログラム) |
| I2C | |
| チャンネル数 | 1 |
| コネクタ | 2pin ピンヘッダ |
| 通信速度 | 最大400Kbps |
| 通信プロトコル | i2c-tiny-usb |
| 対応ソフトウェア | i2c-tools on Linux など |
| SWD/JTAG | |
| チャンネル数 | 1 |
| コネクタ | 4pin ピンヘッダ(3.3Vout, SWDIO, SWCLK, GND) ARM 20pin JTAG コネクタ |
| 通信速度 | 最大5Mbps (ホストとの通信は最大64Kbps) |
| 通信プロトコル | CMSIS-DAP (USB HID) |
| 対応ソフトウェア | OpenOCD, Keil MDK-ARM, IAR など (CMSIS-DAP をサポートしているツール) |